
线性和角位移测量系统



- 确定沿三个轴X,Y和Z的线性和角运动
- 监视和记录物体(例如,滚动时的船舶)的运动参数
- 确定船只的侧倾角,纵倾角,偏航角,纵向和垂直运动。
工作原理
线性和角位移测量系统
该系统是一个移动硬件和软件复合体,其中包括:
移动记录仪(数字加速度计ZET 7152-N-VER.1, 接口转换器ZET 7176,自主记录仪ZET 7173,使用GPS / GLONASS信号ZET 7175的同步模块,可移动电池的可充电电池);
两个外部线性加速度传感器(数字加速度计ZET 7152-N);
用于处理注册参数的专用软件。
记录仪直接安装在测量对象上,并被牢固固定。根据监视参数的数量,确定远程传感器的位置。传感器也牢固地固定在物体上并连接到记录仪。系统中数字传感器的组合使得可以确定所有六个自由度上受监视对象的运动参数。
移动记录仪可将数据从数字传感器传输到PC,以进行进一步处理。借助作为移动记录器一部分的ZET 7175同步模块,来自数字传感器的信息可以一次链接到GPS / GLONASS卫星导航系统。该系统还可以在独立模式下工作,并记录有关对象对高达32 GB的闪存驱动器的影响的反应参数的数据。
数据处理使用专用软件SCADA-project“用于测量线性和角位移的系统”进行。
程序窗口包含几个工作面板:
测量通道-从列表中选择数字传感器的通道,这些通道将用于测量。选择通道后,将自动显示与所用传感器相对应的频率和测量极限。
测量参数-可配置的预定测量时间s(在程序处理数字加速计发送的信号的时间期间);低通滤波器(使用低通滤波器对给定加速度计通道进行信号滤波的分辨率),信号单位(可选加速度单位:“ g”或“ m / s 2 ”),基本距离,m(敏感元件之间的距离)的数字传感器)。
当前测量时间-一次注册的当前测量时间。
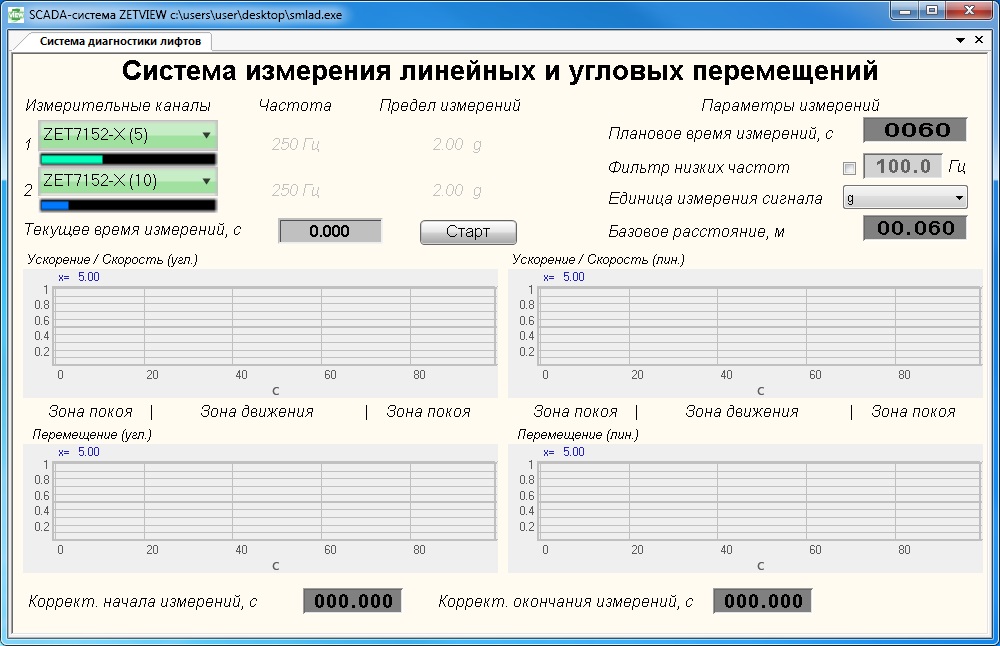
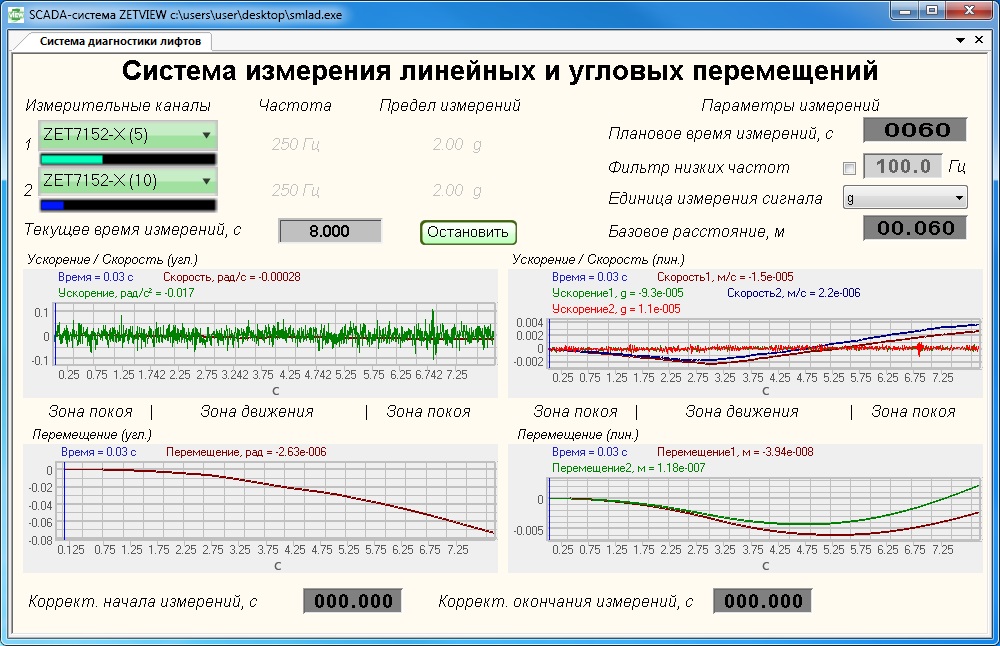
按下“开始”按钮开始注册过程,同时按钮的颜色和名称变为“停止”。随着测量过程的开始,数据处理开始,这由不断变化的当前测量时间所证明。该过程的结束是通过按“停止”按钮完成的,同时按钮的颜色和名称更改为“开始”。停止后,当前测量时间停止更改。同时显示加速度和速度图以及线性和角运动图。
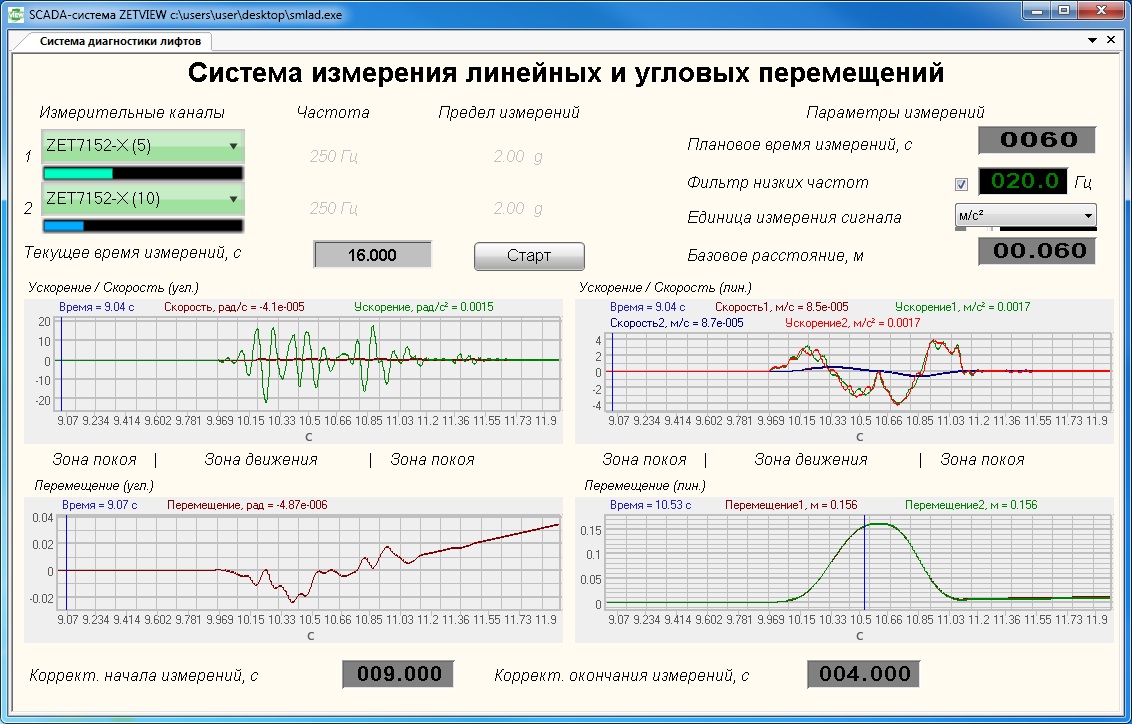
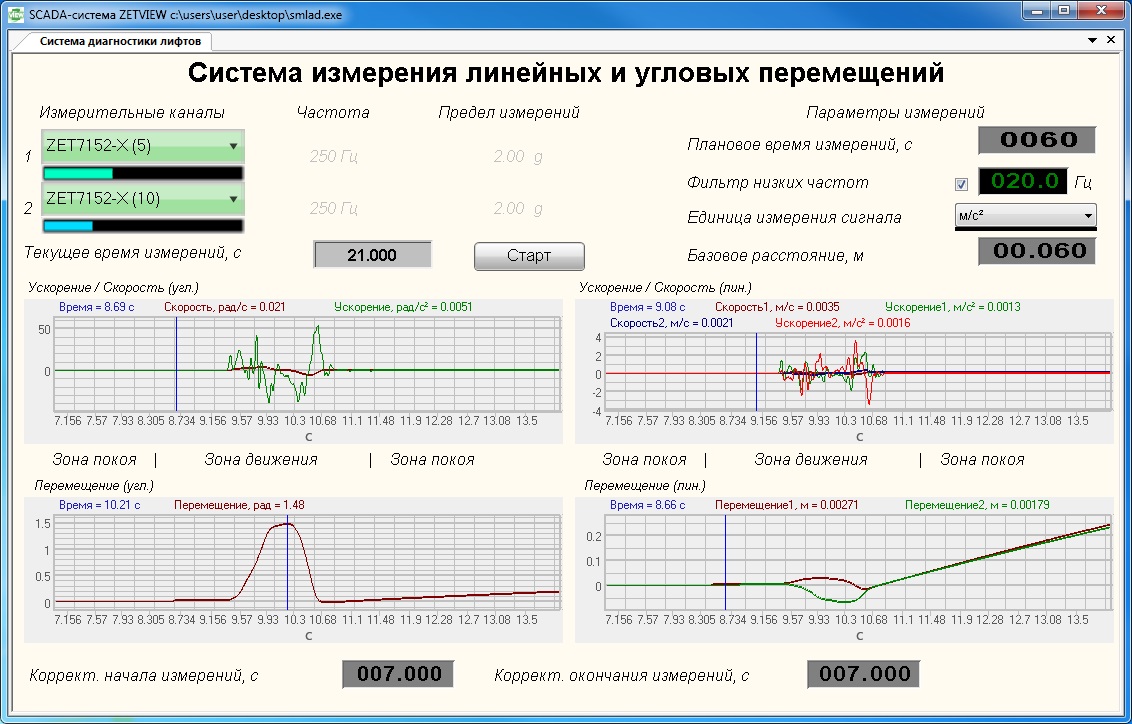
使用两个选择器``测量开始的校正''和``测量结束的校正'',有必要精确指定参数值以正确计算测量值。这些参数设置从测量的开始和结束要减去多少秒。时间调整应使用加速度和速度曲线图进行。
在测量结束时,线性和角位移的测量值将显示在图表上。
该项目旨在在短时间内测量线性和角位移。为了扩展测量系统的功能,使用了ZETLAB软件中的程序。也可以使用ZETVIEW SCADA系统将项目细化为所需的形式。